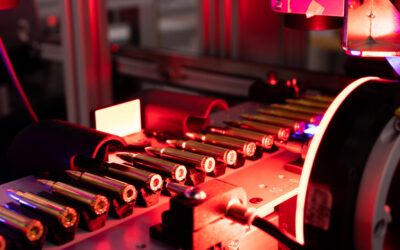
För att förenkla implementationen av bin picking–applikationer skulle Mabema vilja utreda möjligheterna att med hjälp av maskininlärning och äkta höjddata från 3D-sensor skanna av miljön kring ett plockläge och bygga upp kollisionsvolymer automatiskt.
Kollisionsvolymer är förenklade geometriska former som går snabbare att testa kollisioner mot än rådata och utgörs ofta av rektanglar, sfärer och cylindrar. När kollisionsvolymerna tas fram idag väljer visiontekniken manuellt vilken form som lämpar sig bäst för ett visst hinder (exempelvis en rektangel som approximerar en stolpe). Denna process bör kunna automatiseras med maskininlärning som på egen hand kan välja den mest lämpliga formen. En felaktig form (t.ex. större än nödvändig) kan begränsa plockmöjligheter i för stor utsträckning och i slutändan resultera i att plockbara detaljer anses oplockbara. En för snäv form ökar risken för kollision med robot (som också utgörs av ungefärliga kollisionsvolymer vid kollisionstestet).
Uppgift
Utreda möjligheterna att med hjälp av maskininlärning och äkta höjddata från 3D-sensor skanna av miljön kring ett plockläge och bygga upp kollisionsvolymer automatiskt. Med utgångspunkt i tillgänglig kodbas på Mabema för bin picking och hinderdetektion avgöra hur förenklade kollisionsvolymer automatiskt kan genereras baserat på flera bilder, samt vilka prestanda som krävs i form av hårdvara.
Projektgenomförande
Exjobbet genomförs på Mabema AB, i företagets lokaler i Jägarvallen, typiskt med akademisk handledare och examinator från Linköpings universitet. Mabema kan bistå med teknisk handledning. Miljön är Visual Studio/C#.
Ansök via formuläret här.