
Bin picking directly from pallet
- Picking unsorted goods directly from pallet.
- Silent handling.
- Quick and easy installation.
- System configuration using 3D CAD models.

Unsorted picking of crown wheels with our BinPicker. Double stool seats with a camera over each stool for increased accessibility and flexibility. Complemented with a 2D camera in a gripping station for correct loading of processing machine.

We thank Ljunghäll AB for the trust and a very successful project in 2017. Our FINDER BinPicker can pick unsorted goods but in this case it became “simple” with finely stacked engine details.
Geberit Group is a European leader in sanitary products. In Bromölla, they produce sinks, toilets and much more. We have installed Mabema FINDER BinPicker 2.0 to identify and locate each toilet and sink in 3D.
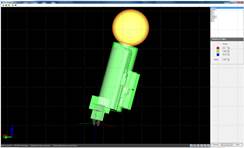
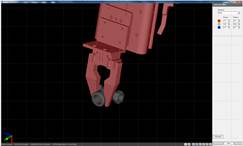
FINDER BinPicker is excellent for picking of products with complex shapes requiring surface-based matching for accurate result (for example casted or forged components). The camera and the laser light unit provide a point cloud image by triangulation. FINDER BinPicker does not require any external illumination.
In order to avoid collisions, the 3D collision detection system keeps track of the robot wrist unit, the robot gripper, the products, the pallet collars and other undefined scan data.
FINDER BinPicker is a complete bin picking product, which is easily installed and quickly connected with a robot. The system supports all of the leading robot manufacturers. The system is flexible and allows for rapid product changeovers. Products and robot grippers are easily imported as 3D CAD files.
Easy configuration with BinPicking Wizard
BinPicker Wizard is the offline utility that configures the bin picking application through a user interface. The steps help the user through the process. When the four steps are completed, the project is exported to FINDER BinPicker.
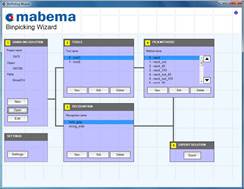
The main menu. Vision projects are created and changed.
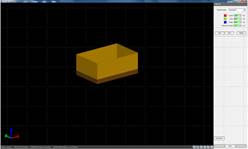
Step 1. The pallet is defined and 3D CAD models of grippers and detail are imported. Enter your own pallet size or use the pallet size templates.
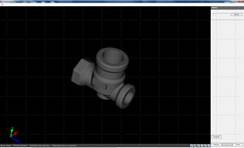
Step 2. Views are created. Then the different views of the product are generated. Unwanted properties are easily removed with cut-out features.
Guidance: FINDER
We offer all customers free pre-studies in our fully equipped test center. Get guidance on which FINDER product is best suited by calling +46 (0) 73-515 37 11 or send us an email.
Training: RobotVision
During a full day, you will get to know FINDER 3D as well as practical exercises for a basic understanding and management.