
Robotguidning vid pallplockning – FINDER BinPicker
- Ger robotkoordinater i 3D (x,y,z) samt rotationsvinkel
- Passar för gods och produkter som ligger oordnat, huller om buller, i pall eller annat emballage
- Fungerar även om produkterna har varierande ytegenskaper
- 3D-form- eller CAD-baserade matchningsmodeller
- Stöd för upp till 8 kameror där 3D-kameran (ToF, lasertriangulering eller strukturerat ljus) kan kombineras med en eller flera 2D-kameror eller stereopar
- Konfigurering av kollisionshantering i 3D med möjlighet att lägga till omvärldshinder i arbetsområdet och import av gripdon

Osorterad plockning av kronhjul med vår BinPicker. Dubbla pallplatser med en kamera över varje pall för ökad tillgänglighet och flexibilitet. Kompletterad med en 2D kamera i en omgreppsstation för korrekt laddning av bearbetningsmaskin.

Vi tackar Ljunghäll AB för förtroendet och ett väldigt lyckat projekt under 2017. Vår BinPicker kan plocka osorterat gods men i det här fallet blev det ”enkelt” med fint staplade motordetaljer.
Geberit Group är en europeisk ledare inom sanitetsprodukter. I Bromölla produceras bl.a. handfat och toaletter. Har har vi installerat Mabema BinPicker 2.0 för att identifiera och lokalisera varje toalett och handfat i 3D.
Det är en komplett bin picking lösning med enkel installation och som snabbt kopplas ihop med robot. Systemet har stöd för de ledande robotfabrikaten. Systemet är flexibelt och medger snabb omställning vid produktbyte.
Kollisioner med robot, gripdon, detaljer, pallkragar, hinder och skanningsdata hanteras vid konfigureringen av produkten. FINDER BinPicker har en mycket avancerad kollisionshantering som tar hand om de flesta kritiska siuationer som kan uppstå vid osorterad plockning.
FINDER BinPicker konfigureras med fördel med hjälp av 3D CAD-modeller: gods, gripdon och emballage. Leveransen inkluderar därför BinPicker Wizard som är en grafisk konfigurator som definierar projektet off-line med hjälp av 3D CAD-data. Genom att importera CAD-modeller för god och gripdon skapas grunden för hela applikationen, inklusive visionmodeller i alla förekommande perspektiv, kollisionshantering och griplägesalternativ.
Notera att FINDER BinPicker är en viktig komponent i utformningen av gripdon. Med hjälp av BinPicker Wizard kan gripdonet verifieras innan det fysiskt är tillverkat! Det innebär att 3D-modeller av donet testas i verkliga bilder och olika varianter kan jämföras tidigt i konstruktionsfasen. Bin Picking-projektets resultat är starkt beroende av gripdonets plockbarhet. Utmaningen är att skapa ett gripdon som kan plocka objektet oavsett vilken sida som visas för kameran.
FINDER BinPicker är kompatibel mot 3D-kameror som genererar punktmolnsbilder. Bildbehandlingen är i grunden en formbaserad matchning. Formbaserad matchning tar inte hänsyn till konturer utan arbetar endast med topografisk passning mellan objektet och bilden.
FINDER BinPicker kompletteras med FINDER 2D för omgreppsfunktion om detaljerna ska vara karakteristiskt orienterade i nästa moment, exempel för maskinbetjäning.
Precis som FINDERs övriga produkter utmärks FINDER BinPicker av stor flexibilitet när det gäller kamera- och robotkommunikation.
Enkel konfigurering med BinPicker Wizard
Binpicking Wizard är ett off-line verktyg som konfigurerar bin picking applikationen i ett grafiskt användargränssnitt. Stegen guidar användaren genom processen. När de fyra stegen är klara exporteras projektet till FINDER BinPicker.
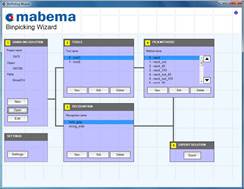
Huvudmenyn. Visionprojekt skapas och ändras.
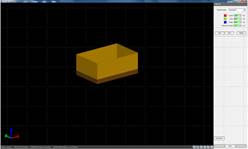
Steg 1. Pallen definieras och 3D CAD-modeller på gripdon samt detalj importeras. Här finns nbyggda mallar för pallformat men pallformaten kan skräddarsys.
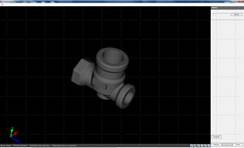
Steg 2. Nu skapas visionmodeller (vyer). Detaljens olika vyer genereras. Oönskade egenskaper tas enkelt bort med inbyggda klipp-ut-funktioner.
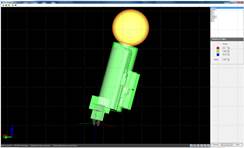
Steg 3. Här adderas kollisionsvolymer bland annat på det importerade gripdonet. Solida former används för att snabbt kunna beräkna kollisionsriskerna.
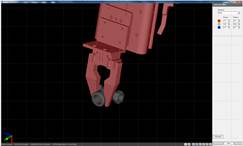
Steg 4. Grippositioner definieras. Plockpositioner anges genom placering av gripdonet i önskade lägen på detaljen.
Rådgivning: FINDER
Vi erbjuder alla kunder fria förstudier i vårt välutrustade testcenter. Få råd vilken produkt som lämpar sig bäst genom att ringa 073-515 37 11 eller skicka oss ett mail.
Utbildning: Robot Vision
Under en heldag kommer du få en presentation av systemet samt praktiska övningar för en grundläggande förståelse och hantering.
Kontakta oss för nästa kurstillfälle.